
指数新规抢先看丨智能驾驶技术哪家强?IVISTA 2023版导航智能驾驶测评来帮忙
- 2024-03-01 12:45:59
发布者: 管理员分类: 智能安全科普
今年春节假期的返乡与回程,很多人都选择了自驾这一更加自由的方式。在高速公路的漫漫长途中,L2+导航智能驾驶功能(Navigation Pilot,NP)能够带给驾乘人员带来更加便捷、舒适的智慧出行全新体验,也在逐渐改变着人们的用车习惯,已成为不少“智驾发烧友”爱车的必备功能。但是,技术的纷繁复杂、实际效果的体验差异,也让很多用户不知如何选择。
为了让消费者更真实地了解各车型的智能驾驶水准,推动行业智能驾驶技术的健康发展,IVISTA中国智能汽车指数2023版规程全新升级,以更严格的智能驾驶标准,为用户提供权威的购车依据。此前, IVISTA中国智能汽车指数在2020版规程中发布了全球首个L2+导航智能驾驶(高速公路)规程,并率先开展测评。此次规程的升级,也意味着通过该规程测试的车型,在更复杂路况下将拥有更好的智能驾驶体验。

部分导航智能驾驶产品及功能示意图
测评规程
IVISTA导航智能驾驶测评在安全底线要求的基础上考察用户体验,创新采用“仿真-场地-道路”三支柱测试方法,对车辆安全性与功能完成度两个维度进行综合测评。
规程包括封闭场地测评、开放道路测评、模拟仿真测评三部分,满分110分。整体得分率≥75%则赋予被测车型智能行车优秀+(G+)评价(需同时满足行车辅助系统试验得分率≥80%),代表量产L2+导航智能驾驶汽车的最优秀水平。
导航智能驾驶系统试验得分 = min{封闭场地试验得分,开放道路试验得分}+ 模拟仿真试验得分。
01封闭场地测评
在导航智能驾驶-封闭场地测评部分,规程紧贴中国消费者实际高速公路用车需求,设计了7类典型危险场景,在中国汽研智能汽车专业试验场开展测试。
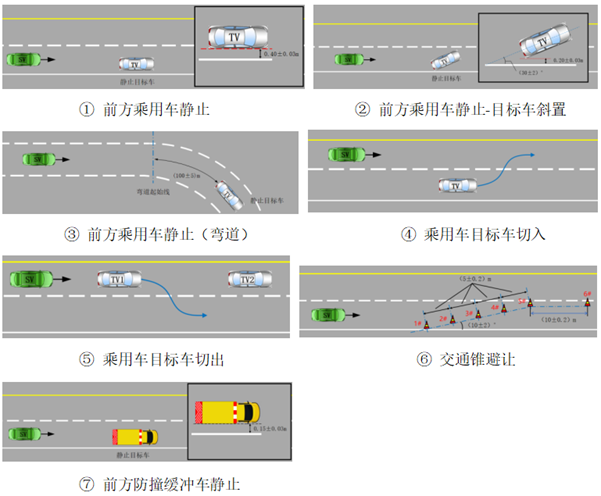
其中,在2020版规程上,基于对中国实际交通事故案例深入分析,发现智能汽车对高速公路防撞缓冲车等新型目标物的感知识别存在问题并造成了多起典型事故发生,新版规程在行业首次引入了“前方防撞缓冲车静止”场景,并研发了相应测试目标物,具备和真实防撞缓冲车同样的物理特征,持续夯实智能汽车的安全底线。

封闭场地测评满分100分,针对每个具体场景,车辆需通过该场景规定的所有测试工况,才能得到相应分数。
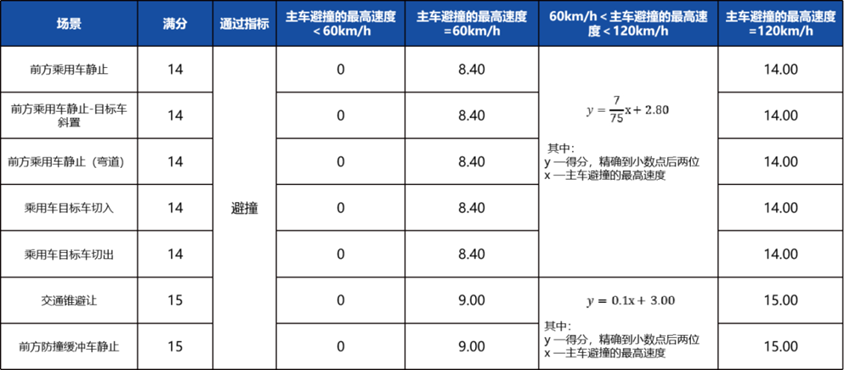
注:若主车采取换道策略实现避撞,在主车变道前需开启转向灯。若未开启转向灯,相应测试场景得分扣5分。
02开放道路测评
在导航智能驾驶-开放道路测评部分,规程在“8D魔幻城市”山城重庆选择了两条共约200公里的高速公路开展“实战”测评,帮助消费者选出真正能解决高速公路用车痛点的优秀智能汽车产品。其中一条路线位于市区,是市民每天通勤的主动脉,具有车流量大、匝道密集等特点;另一条路线位于城郊,车流量适中,对应用户长距离出行的用车场景。
开放道路测评满分100分,包含拥堵走停、隧道通行、车道减少、匝道通行场景共20个具体测试工况(每个测试工况满分5分)。
开放道路试验得分 =∑(具体试验工况得分)* NP功能激活百分比-罚分+加分
其中:
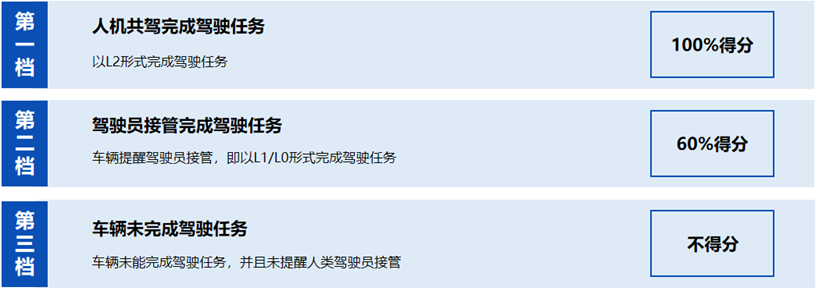
① 对L2+导航智能驾驶车辆在每个测试工况下的功能完成度表现,根据车辆实际执行驾驶任务的等级分为3档进行评分。
② NP功能激活百分比是在开放道路测试过程中,车辆L2+导航智能驾驶功能实际激活里程在理论可激活总里程中的占比。该指标实际百分比越大,说明产品功能对实际道路的适应性越好,会大大提升用户实际用车的体验感受。
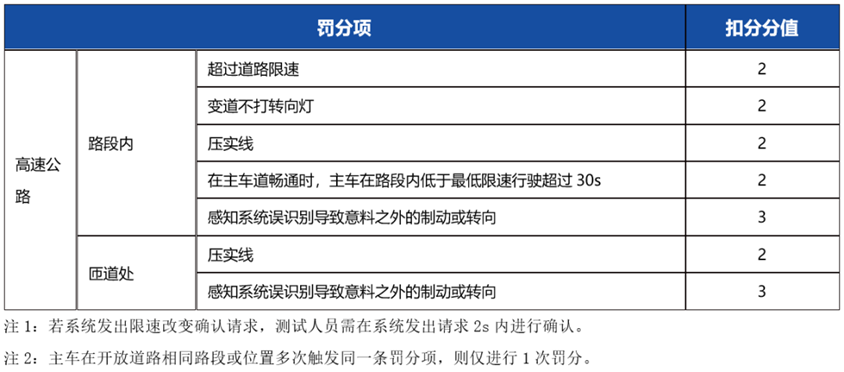
③ 罚分项:若车辆出现不符合交规要求、误识别误触发等情况,则在得分中相应罚分(累计不超过20分)。
④ 加分项:若车辆成功实现以下功能,带给消费者更加便捷、舒适的使用体验,则在得分中相应加分。

03模拟仿真测评
在导航智能驾驶-模拟仿真测评部分,2023版规程仿真试验方法在2020版基础上进行了优化升级,可通过见证测试、现场测试、第三方测试三种方式实施,包括基础场景测试、场景泛化测试两部分,其中:
基础场景测试:试验场景及工况与封闭场地试验相同,旨在验证模拟仿真试验与实车封闭场地试验结果的一致性,得到模拟仿真试验置信度Re。

注1:在针对模拟仿真试验基础场景测试的7个测试场景,选择每个场景对应的封闭场地试验企业申报线速度点以及合格线速度点(60km/h)的试验工况,一共有14个试验工况,即为上式中的分母。
注2:针对注1中的14个试验工况,若模拟仿真试验结果通过性与封闭场地试验结果通过性不相同,则该工况为结果不一致工况。
注3:针对同一试验工况,若模拟仿真试验与封闭场地试验均得到满分,则为两者通过性相同。
场景泛化测试:在基础场景测试基础上,对车辆开展高覆盖度和危险边缘测试,包含前车紧急制动、主车视野受阻情况目标车切入、施工区域通行等10类场景。

模拟仿真测评满分10分,计算公式为:
模拟仿真试验最终得分 = ∑(场景泛化测试得分)×Re
随着汽车智能驾驶水准的不断提升,技术的复杂性与用户易选择性之间的鸿沟越来越大,专业权威的测试标准成为筛选高质量产品的一道防线。IVISTA智能指数以技术发展趋势和消费者更高需求为导向,针对测试规程进行全新升级,不仅是对汽车智能驾驶评测标准的前沿探索,也为消费者购车提供了关键性的购车参考。
未来,随着导航智能驾驶技术与产品不断发展,功能从高速公路逐渐覆盖更为复杂的城市道路,IVISTA智能指数持续开展前瞻研究,紧密贴合产业技术发展趋势及消费者买车用车需求,为中国消费者安全、便捷智慧出行保驾护航!